Σφάλμα ρομπότ
- 2 μικροί κινητήρες 1,5 βολτ (μπορούν να αγοραστούν ή να αφαιρεθούν από παλιά παιχνίδια (βλ. φωτογραφία).)
- 2 μικροί συνδετήρες
- 2 μεγάλοι συνδετήρες
- 1 μέτρο ηλ. σύρματα
- 2 μικροί διακόπτες SPDT (μπορείτε να τους αγοράσετε ή να τους αφαιρέσετε, για παράδειγμα, από ένα παλιό ποντίκι υπολογιστή)
και επίσης εργαλεία:
*κολλητήρι + λίγο τενεκέ
*Πιστόλι κόλλας και ένα ραβδί κόλλας για αυτό (το ραβδί κόλλας μπορεί να λιώσει απλά με ένα κολλητήρι, αλλά συνιστάται να το κάνετε με πιστόλι κόλλας)
* κόφτες σύρματος (για την αφαίρεση της μόνωσης)
και εδώ είναι όλες οι λεπτομέρειες

Συνέλευση:
1. ηλεκτρική λειτουργία σύρμα σε 13 κομμάτια των 6 cm το καθένα και αφαιρέστε τη μόνωση από αυτά (και στις δύο πλευρές) 1 cm το καθένα.

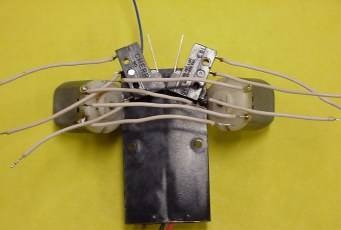
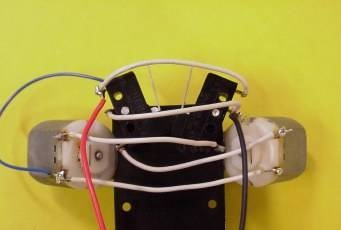
2. Συγκολλήστε τα καλώδια σε καθένα από τα εξαρτήματα (εκτός από τις μπαταρίες), δείτε την εικόνα.

κολλήστε το σύρμα στο ρόπαλο. θήκη (μπλε) (τρίτη σύνδεση)

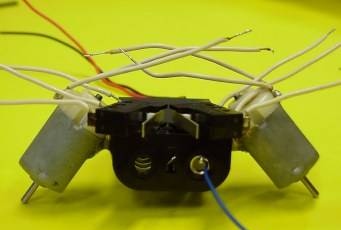
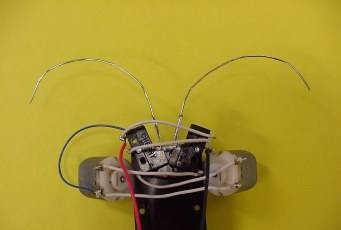
3. Γυρίστε ανάποδα τη θήκη της μπαταρίας και κολλήστε τους διακόπτες σε σχήμα "V" (βλ. φωτογραφία)

4. Κολλήστε 2 μοτέρ ανάμεσα στους διακόπτες έτσι ώστε το ίδιο το πλαίσιο του κινητήρα να αγγίζει το έδαφος

5.Από ένα μεγάλο συνδετήρα και μια μπάλα φτιάχνουμε έναν σταθεροποιητή (ένα τροχό για να διευκολύνουμε την κίνηση κατά μήκος της επιφάνειας)
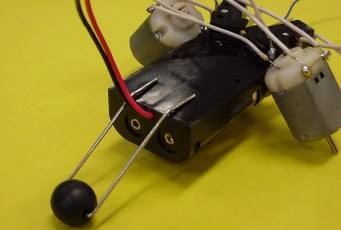
6. σύνδεση
έτσι πρέπει να είναι όλα

7. πάρε 2 μικρά. συνδετήρες και φτιάξτε από αυτά μουστάκια για ένα σκαθάρι

8. κολλήστε προσεκτικά το μουστάκι στους διακόπτες (χρησιμοποιήστε λίγη κόλλα για αυτό για να μην κολλήσετε τον ίδιο τον διακόπτη)
9. Τυλίξτε λίγη μόνωση στον μηχανισμό κίνησης του κινητήρα (για καλύτερο κράτημα)
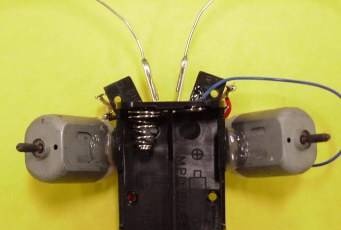
10. Τοποθετήστε τις μπαταρίες

και τελείωσες!)
Δεν είναι πολύ δύσκολο. Μόλις το έκανα μόνος μου!!!
Το αστείο είναι ότι όταν αγγίζει ένα εμπόδιο με το δεξί του έλικα, ο άλλος τροχός σταματάει και αυτός στρίβει προς τα αριστερά και το αντίστροφο. (Πηγαίνει γύρω από τα εμπόδια)












