error robot
- 2 motores pequeños de 1,5 voltios (se pueden comprar o quitar de juguetes viejos (ver foto).)
- 2 clips pequeños
- 2 clips grandes
- 1 metro el. alambres
- 2 pequeños interruptores SPDT (puedes comprarlos o quitarlos, por ejemplo, de un viejo mouse de computadora)
y también herramientas:
*soldador + algo de estaño
*pistola de pegamento y una barra de pegamento (la barra de pegamento se puede derretir simplemente con un soldador, pero se recomienda hacerlo con una pistola de pegamento)
* cortadores de alambre (para quitar el aislamiento)
y aquí están todos los detalles

Asamblea:
1. modo eléctrico cable en 13 trozos de 6 cm cada uno y quíteles el aislamiento (en ambos lados) 1 cm cada uno.

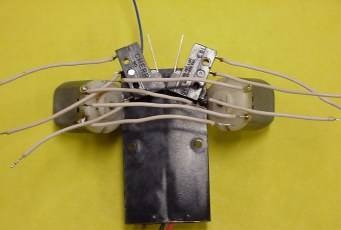
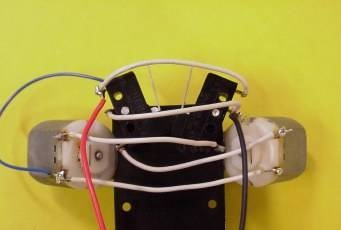
2. Soldar los cables a cada uno de los componentes (excepto baterías), ver figura.

suelde el cable a la batería. soporte (azul)(tercera conexión)

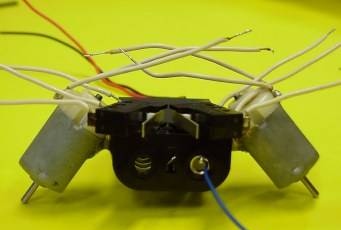
3. Voltee el soporte de la batería y pegue los interruptores en forma de “V” (ver foto)

4. Pegue 2 motores entre los interruptores para que el chasis del propio motor toque el suelo.

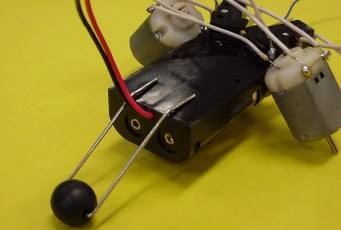
5.A partir de un clip grande y una bola hacemos un estabilizador (una rueda para que sea más fácil moverse por la superficie)
6. conexión
así es como debería verse todo

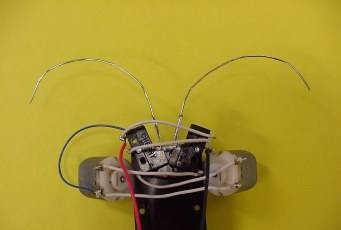
7. toma 2 pequeños. clips y hacer bigotes para un escarabajo con ellos

8. Pegue con cuidado el bigote a los interruptores (use un poco de pegamento para esto para no pegar el interruptor)
9. Envuelva un poco de aislamiento en el tren de rodaje del motor (para un mejor agarre)
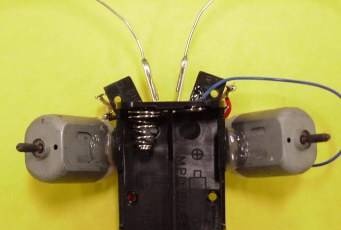
10. Inserte las baterías

¡y tu estas listo!)
No es muy difícil. ¡¡¡Lo hice yo mismo!!!
Lo curioso es que cuando toca un obstáculo con su zarcillo derecho, la otra rueda se detiene y él gira hacia la izquierda, y viceversa. (Salta los obstáculos)












