Port IR z myszy COM
Któregoś dnia trzeba było sprawdzić prehistoryczny (rosyjski) pilot. Nie było funduszy. Przeszukując internet znalazłem kilka pomysłów. Byłem zdumiony pomysłem zrobienia prostego portu IR z myszy! Komputer oczywiście. Zaczniemy od tego urządzenia.
1.Port IR myszy kulkowej COM.
Oszołomiony pomysłem poszedłem do szafy i wykopałem kilka myszy kulkowych, każda starsza od drugiej. Starszy miał 6 przewodów wychodzących z komputera, nowszy miał cztery. On wziął to. Linie biegły czterema przewodami: RTS (Request To Send, żądanie wysłania. Służy do zasilania obwodu myszy.), Rx (przez który komputer odbiera dane), Tx (przez który komputer przesyła dane) i oczywiście GND, masa.

Na zdjęciu widać wtyczkę przewodu myszy. Podczas testu odkryłem, że pomarańczowy przewód to RX, zielony przewód to TX, biały przewód to RTS, a niebieski przewód to masa.
Następnie dla uproszczenia odciąłem kawałek plastiku i przykleiłem na nim złącze pinowe myszy (to, które jest wlutowane w płytkę):

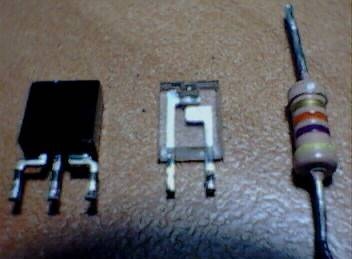
Następnie usunąłem mostek fotodiodowy i podczerwień z tej samej myszy Dioda LED. Z moich zapasów wziąłem rezystor 4,7 kOhm. Urządzenie do rezystora nie jest krytyczne - można ustawić od 2 do 7 kOhm, ale przy niższej rezystancji promień działania odbiornika maleje.Oto jak wyglądają części (od lewej do prawej: mostek fotodiody, IR Dioda LED, rezystor):
Oto schemat urządzenia:
Po pół godzinie lutowania i klejenia wyszło coś takiego:

Urządzenie okazało się działać - niezawodny promień odbioru - 5 cm, transmisja - 20 cm Okazało się, że wystarczyło do sprawdzenia pilota: nie działa.
2. Zaawansowane urządzenie nadawczo-odbiorcze IR.
Skoro już uciekliśmy, musimy porozmawiać o bardziej zaawansowanym urządzeniu.
Port składa się z odbiornika (chip TSOP i body kit) oraz nadajnika (Dioda LED HL1 i rezystor ograniczający prąd R2).
Odbiornik wykorzystuje specjalizowany mikroukład TSOPXXXX. Odbiera sygnał o określonej częstotliwości. Zapewnia to wysoką odporność na zakłócenia. Ponieważ dostępne są w kilku wersjach – dla różnych częstotliwości filtrowania sygnału, trzeba wybrać tę, która jest potrzebna do konkretnego pilota. Spójrzmy na arkusz danych:
Jak widać, jest wybór: od 30 do 56 kiloherców. W karcie katalogowej podano, że maksymalna prędkość odbieranego sygnału to 2400 bodów/s, dlatego trudno ocenić, czy mikrofon będzie współpracował np. z telefonem komórkowym. Tak wygląda TSOP1736:
Rezystor R1 zasila linię RX (w końcu wszystkie sygnały portu COM są odwracane), dioda VD1 chroni obwód przed odwróceniem polaryzacji podczas inicjalizacji portu, a kondensator C1 chroni odbiornik przed zakłóceniami. No cóż, stabilizator 7805 oczywiście reguluje napięcie do odbiornika IR. Radzę zainstalować go w obudowie TO-92 - jest mniejszy.
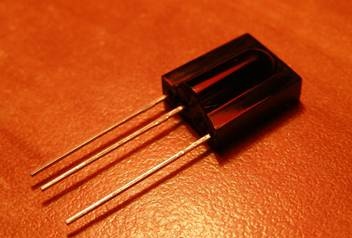
Nadajnik nie jest specjalnie zaawansowany, różni się jedynie mocniejszą diodą IR. Możesz umieścić na przykład L-34F3C, L-54F3C. Rezystor R2 ogranicza prąd płynący przez diodę. Dioda IR wygląda następująco:

To urządzenie dobrze odbiera i transmituje w odległości do 5 m.
Jeśli chcesz poeksperymentować, oto rozkład pinów portu COM, rozpowszechniony w Internecie:
3.Programy do pracy z portami IR.
Porozmawiajmy teraz o programach. Do sprawdzenia użyłem programu WinLirc. Urządzenie pokazało całkiem dobre wyniki: promień odbioru wynosił 5 cm, promień transmisji wynosił maksymalnie 20 cm. Wszystko zależy od rodzaju fotokomórek. Jako przykład podam przykład pracy z pilotem z centrum muzycznego.
Porozmawiajmy o konfiguracji.
Uruchom VinLIRC. Pisze: konfiguracja nie powiodła się, skonfiguruj ponownie. Wpisz ścieżkę i nazwę pliku konfiguracyjnego w polu Ścieżka, a następnie wykonaj następujące kroki: (uwaga: te ustawienia dotyczą tylko tego urządzenia):
1. W polu Port wpisz numer portu, do którego podłączone jest urządzenie
2. Pole Speed pozostaw niezmienione, aczkolwiek możesz poeksperymentować – starsze komputery nie chcą myśleć szybciej niż 115200 bps.
3. W ramce Typ odbiornika ustaw urządzenie RX, ponieważ IRDioda LED (TSOP) jest podłączony do gałęzi RX portu COM. Można oczywiście podłączyć się do DTR, ale będzie to domowy przewód, a nie od standardowej myszki, jak tutaj.
4. W ustawieniach nadajnika ustaw TX. Możesz połączyć się z DCD - masz rację.
Następnie kliknij opcję Surowe kody. Przykładamy pilota do odbiornika i wciskamy przyciski. Jeśli zacznie pulsować, np.: impuls 200, impuls 400, to wszystko jest w porządku. Jeśli nie, sprawdź urządzenie pod kątem błędów.
Teraz musisz nauczyć głupi program rozpoznawania poleceń pilota. Zamknij okno podglądu i kliknij Dowiedz się. A potem kierujemy się językiem angielskim, bo prog jest burżuazyjny.
PS: Tam, gdzie program mówi „naciśnij przycisk na pilocie i przytrzymaj go, aż ci powiem”, nie powinieneś przytrzymywać przycisku, ale naciskaj go tak szybko, jak to możliwe - z własnego doświadczenia.
Po przestudiowaniu kliknij Analizuj. Program sprawdzi konfigurację i powie OK. Zamykamy okno.
Wygląda na to, że to wszystko. Kliknij OK w głównym oknie ustawień. Program zostanie zminimalizowany do zasobnika.Wciskamy przyciski na pilocie – jeśli program rozumie polecenia, to reaguje – kolor wskaźnika zmienia się z szarego na zielony. Do tego programu można znaleźć wtyczki do zarządzania WinAMPem i do pracy z TCP/IP.
Do zaawansowanego zarządzania komputerem polecam program uICE.
Ogólnie rzecz biorąc, obecnie istnieje wiele programów w tej sprawie. Polecam poszukać w Internecie.
Ten program służy już do sterowania komputerem z kanapy - można znaleźć do niego także wtyczki do WinAmpa.
Podobne klasy mistrzowskie





Szczególnie interesujące






Komentarze (8)
