Paano gumawa ng braso ng robot para sa animatronics.
Para gumawa ng robot arm, gumamit ka ng isang piraso ng corrugated plastic tubing, isang CD case, twine, glue at duct tape. Ang manipulator mismo ay sapat na malakas upang hawakan, halimbawa, isang bote o isang cell phone.

Una, gumawa ng template ng kamay ng robot sa isang piraso ng papel gamit ang iyong sariling kamay. Markahan ang mga bisagra para sa bawat "daliri".
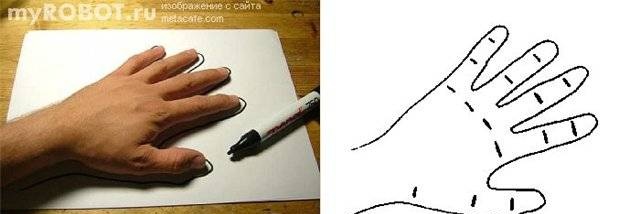
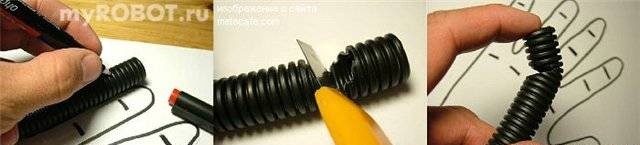
Gumawa ng "mga daliri" mula sa plastic tube na ginagamit ng mga electrician sa pagpapatakbo ng mga wire. Ang tubo ay madaling maputol gamit ang isang regular na stationery na kutsilyo. Gupitin ang tubo sa isang haba na katumbas ng distansya mula sa dulo ng iyong daliri hanggang sa iyong pulso. Gawin ito para sa lahat ng "daliri" ng robotic na kamay. Sa mga nagresultang tubo, markahan ang mga bisagra gamit ang isang marker at pagkatapos ay gumawa ng V-shaped cut para sa bawat liko.
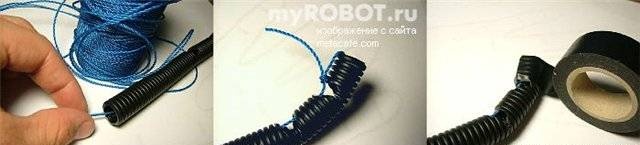
Ipasok at i-secure ang nylon twine sa bawat daliri ng tubo. Iwanan ang mga dulo nang sapat na mahaba (maaari mong laging putulin ang mga ito sa ibang pagkakataon).
Gumamit ng lumang CD case para kumuha ng isang piraso ng plastic. Gamit ang isang ginupit na piraso ng plastik, ikonekta ang "mga daliri": idikit ang "mga daliri" sa ibaba lamang ng mga joint ng buko.

Tiyaking inilagay mo ang "mga daliri" sa tamang pagkakasunod-sunod.

Ngayon ay maaari mong alisin ang electrical tape na nagse-secure sa string at gumawa ng ilang mga pagliko ng electrical tape upang ikonekta ang "mga daliri" nang mas mahigpit.

Idikit ang hinlalaki gaya ng ipinapakita sa larawan at i-secure ito gamit ang electrical tape para sa lakas.

Gamit ang mga natira sa iyong CD case, gumawa ng pulso.

Mas mainam na palakasin ang kamay ng nagresultang braso ng robot sa pamamagitan ng pagpasok nito sa isang mas matibay na tubo.

Maaari mong idikit ang foam na goma sa "palad" at sa mga dulo ng "mga daliri".

Maaaring gamitin ang braso ng robot sa iba't ibang uri ng mga proyektong animatronics. Upang kontrolin ang kamay, maaari mong gamitin ang mga servomotor sa pamamagitan ng pagkonekta sa mga dulo ng string sa isang "rocking chair" na nakakabit sa kanilang axis. Ang dalawang servos ay sapat na upang mabuhay ang kamay ng robot. Ang isang servomotor ay konektado sa malaking "daliri", at ang isa sa iba pa. Upang gawing mas kahanga-hanga ang iyong kamay sa mga animatronic na proyekto, maaari kang maglagay ng malambot at manipis na guwantes dito.
Mga katulad na master class






Lalo na kawili-wili






Mga komento (3)
