Lỗi robot
- 2 động cơ nhỏ 1,5 volt (có thể mua hoặc tháo ra khỏi đồ chơi cũ (xem ảnh).)
- 2 kẹp giấy nhỏ
- 2 kẹp giấy lớn
- 1 mét. Dây điện
- 2 công tắc SPDT nhỏ (bạn có thể mua hoặc tháo chúng ra, ví dụ như từ chuột máy tính cũ)
và cả các công cụ:
* mỏ hàn + một ít thiếc
*súng bắn keo và keo dính cho nó (dính keo có thể được nấu chảy đơn giản bằng mỏ hàn, nhưng nên làm điều này bằng súng bắn keo)
* Máy cắt dây (để loại bỏ lớp cách điện)
và đây là tất cả các chi tiết

Cuộc họp:
1. chế độ điện dây thành 13 đoạn, mỗi đoạn 6 cm và loại bỏ lớp cách điện khỏi chúng (ở cả hai bên) mỗi đoạn 1 cm.

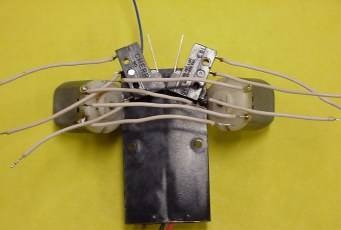
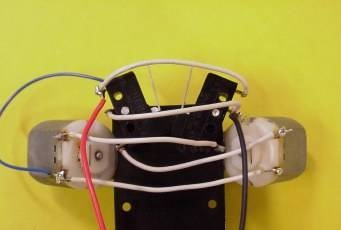
2. Hàn dây vào từng bộ phận (trừ pin), xem hình.

hàn dây vào batt. giá đỡ (màu xanh) (kết nối thứ ba)

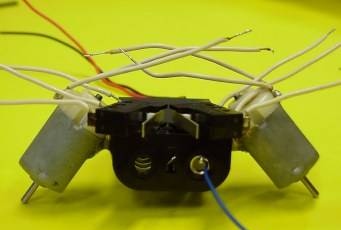
3. Lật giá đỡ pin lại và dán các công tắc vào đó theo hình chữ “V” (xem ảnh)

4. Dán keo 2 động cơ vào giữa các công tắc sao cho khung gầm của động cơ tự chạm đất

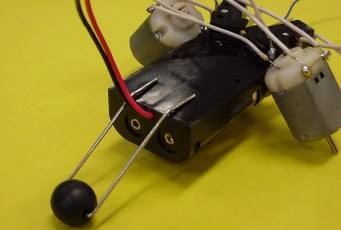
5.Từ một chiếc kẹp giấy lớn và một quả bóng, chúng ta tạo ra một bộ ổn định (một bánh xe để di chuyển dọc theo bề mặt dễ dàng hơn)
6. kết nối
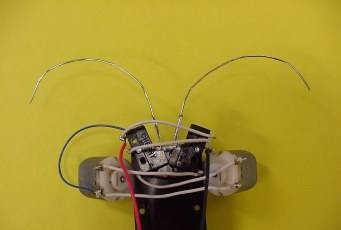
mọi thứ sẽ trông như thế này

7. lấy 2 cái nhỏ. kẹp giấy và làm râu cho bọ cánh cứng từ chúng

8. Cẩn thận dán ria mép vào các công tắc (sử dụng một ít keo cho việc này để không tự dán vào công tắc)
9. Bọc một ít vật liệu cách nhiệt trên bánh răng chạy của động cơ (để bám tốt hơn)
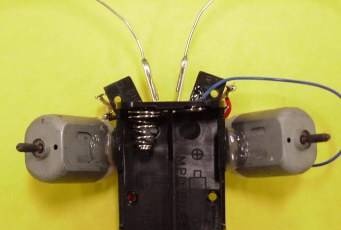
10. Lắp pin vào

và bạn đã hoàn tất!)
Nó không khó lắm. Mình chỉ tự làm thôi!!!
Điều buồn cười là khi anh ta chạm vào chướng ngại vật bằng gân bên phải thì bánh xe kia dừng lại và anh ta rẽ sang trái và ngược lại. (Đi vòng qua chướng ngại vật)












