Kā izveidot robotu roku animatronikai.
Lai izveidotu robota roku, izmantojiet gofrētas plastmasas caurules gabalu, kompaktdiska korpusu, auklu, līmi un līmlenti. Pats manipulators ir pietiekami izturīgs, lai turētu, piemēram, pudeli vai mobilo telefonu.

Vispirms ar savu roku uz papīra izveidojiet robota rokas veidni. Atzīmējiet eņģes katram "pirkstam".
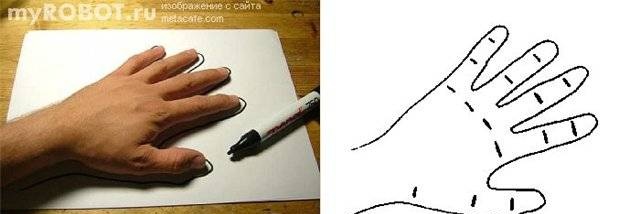
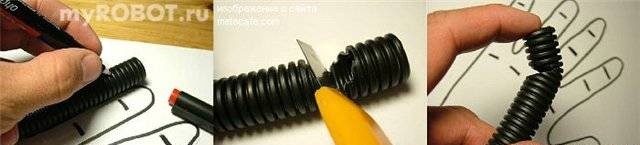
Izveidojiet “pirkstus” no plastmasas caurules, ko elektriķi izmanto vadu vadīšanai. Caurule ir viegli sagriežama ar parasto kancelejas nazi. Izgrieziet cauruli garumā, kas vienāds ar attālumu no pirksta gala līdz plaukstas locītavai. Dariet to ar visiem robotizētās rokas “pirkstiem”. Uz iegūtajām caurulēm atzīmējiet eņģes ar marķieri un pēc tam veiciet V-veida griezumus katram līkumam.
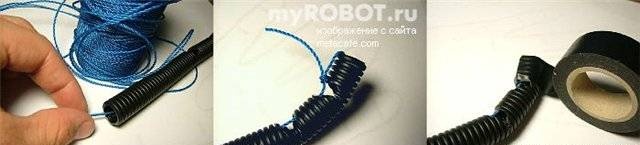
Ievietojiet un nostipriniet neilona auklu katrā caurules pirkstā. Atstājiet galus pietiekami garus (jūs vienmēr varat tos apgriezt vēlāk).
Izmantojiet veco kompaktdiska maciņu, lai iegūtu plastmasas gabalu. Izmantojot izgrieztu plastmasas gabalu, savienojiet “pirkstus”: pielīmējiet “pirkstus” tieši zem locītavu locītavām.

Pārliecinieties, ka ievietojat "pirkstus" pareizā secībā.

Tagad varat noņemt elektrisko lenti, kas nostiprina auklu, un veikt vairākus elektriskās lentes pagriezienus, lai ciešāk savienotu “pirkstus”.

Līmējiet īkšķi, kā parādīts fotoattēlā, un nostipriniet to ar elektrisko lenti, lai nodrošinātu izturību.

Izmantojot CD korpusa pārpalikumus, izveidojiet plaukstas locītavu.

Labāk ir nostiprināt iegūtās robota rokas roku, ievietojot to stingrākā caurulē.

Putuplasta gumiju var pielīmēt pie “plaukstas” un “pirkstu galiem”.

Robota roku var izmantot dažādos animatronikas projektos. Lai vadītu roku, varat izmantot servomotorus, savienojot auklas galus ar “šūpuļkrēslu”, kas piestiprināts pie to ass. Pietiek ar diviem servo, lai robota roka atdzīvotos. Viens servomotors ir savienots ar lielo "pirkstu", bet otrs - ar pārējo. Lai jūsu roka izskatītos iespaidīgāk animatronic projektos, varat uzvilkt mīkstu, plānu cimdu.
Līdzīgas meistarklases






Īpaši interesanti






Komentāri (3)
