Odbiornik podczerwieni do komputera.
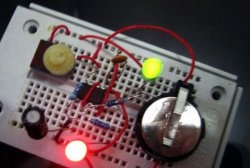
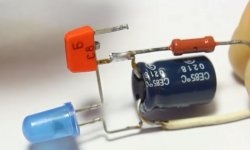
Aby uzyskać wątpliwą przyjemność korzystania z pilota, będziesz musiał złożyć mały obwód. Schemat jest taki:

Prawie każdy element można zastąpić analogiem. Kupiłem pierwszy fotoodbiornik do telewizora, na jaki się natknąłem - „TK-19”, chociaż w sprzedaży było kilka innych analogów. Jak to zwykle mówią: schemat działa natychmiast i nie wymaga żadnych poprawek. Cały ten bałagan można podłączyć do dowolnego portu COM.

Schemat można pięknie zaprojektować - na przykład całkiem ładny terminator jest wykonany z gumowego konia. Odbiornik znajduje się na pokrywie.
Będziesz także potrzebował samego serwera WinLIRC
Dostępna jest również wtyczka do WinAMP, dzięki czemu możesz korzystać z niego nie ruszając się z łóżka.
Zainstalowanie go nie jest trudne, ale jego ustawienie jest dość problematyczne. Wskaźnikiem nastroju programu będzie migający zielony wskaźnik na pasku zadań po naciśnięciu przycisków na pilocie.
Załóżmy, że poprawnie przylutowałeś obwód z części nadających się do użytku. W związku z tym musi działać. Przejdź do witryny http://www.lirc.org/ i kliknij łącze „obsługiwane piloty zdalnego sterowania” prowadzące do strony http://lirc.sourceforge.net/remotes/. Szukamy tam naszego pilota.Jeśli tak, masz szczęście, pobierz jego konfigurację; nie - nie straszne. Podłączamy obwód do wolnego portu COM. Uruchom WinLIRC. Dla ścisłości opisuję kolejność klikania przycisków w wersji 0.6.4 (nie pamiętam co było we wcześniejszych). Jeśli trafi do zasobnika, kliknij prawym przyciskiem myszy i wybierz „Przełącz okno” -> „Rekonfiguruj”. Wybierz port (COM1, COM2), do którego podłączony jest odbiornik. Dla obwodu pokazanego powyżej parametrem „Typ odbiornika” musi być DCD. Prędkość - 115200 (domyślnie) Poczucie - automatyczne wykrywanie (domyślnie) Jeśli udało Ci się znaleźć konfigurację swojego pilota, przejdź do „Konfiguracja” -> „Przeglądaj” i wybierz ją. Przejdźmy do punktu „Wszystko gotowe”. Jeżeli nie udało się znaleźć gotowej konfiguracji, zaczyna uczyć program swojego pilota. Więc:
1. W oknie „Config” wpisz MY_REMOTE.CF (lub coś w tym stylu).
2. Kliknij „Kody surowe”. Naciskamy dowolne przyciski na pilocie. Liczby powinny wyświetlać się w oknie. Zatem wszystko jest w porządku. Zamknij krzyżykiem i przejdź dalej
3. Ucz się. będziesz pytany
Spowoduje to nagranie sygnałów z pilota
i utwórz plik konfiguracyjny dla WinLIRC. Wprowadź nazwę tego pilota.
Musisz wprowadzić nazwę swojego pilota. Tutaj i poniżej lepiej jest podawać nazwy literami łacińskimi (angielskimi), bez spacji.
4.
Podczas uczenia się i analizowania sygnałów wykorzystuje się w tym celu margines błędu
poradzić sobie z normalnymi zmianami odbieranego sygnału. Margines zakresów błędów
od 1% do 99%. Wartość domyślna wynosi 25%, ale w zależności od tego mogą być konieczne większe wartości
na Twoim sprzęcie i oprogramowaniu. Jeśli masz problemy z używaniem pilota,
spróbuj zwiększyć tę wartość. Możesz teraz wprowadzić dopuszczalny margines błędu,
lub naciśnij ENTER, aby użyć wartości domyślnej. Pożądany margines błędu dla tego pilota?
(1-99, wprowadź=25)
Jest wiele słów, po prostu naciśnij „Enter”
5.
Krok pierwszy: Określ przerwę w sygnale, długość sygnału i powtórz kody.
-----------------------------------------------------------------------------------
Zostaniesz poproszony o kilkakrotne naciśnięcie dowolnego przycisku.
Za każdym razem przytrzymaj go przez co najmniej jedną sekundę i poczekaj przynajmniej
jedną sekundę pomiędzy naciśnięciami klawiszy. Jeśli chcesz ręcznie wprowadzić przerwę w sygnale
i długości sygnału, możesz to zrobić teraz (tj. „31000 52”).
W przeciwnym razie po prostu naciśnij ENTER. Szczelina i długość?
Znów jest dużo słów, wystarczy nacisnąć „Enter”
6.
Naciśnij guzik. Poczekaj chwilę i naciśnij ponownie.
Naciśnij i zwolnij dowolny przycisk (na pilocie). Poczekaj chwilę, a następnie naciśnij i zwolnij ponownie. Pojawi się linia
Zainicjowano linię bazową.
Następnie naciśnij przycisk SAME dziesięć (lub trochę więcej), aż osiągniemy zero.
Poczekaj chwilę i ponownie naciśnij przycisk (pozostało 10)
Poczekaj chwilę i ponownie naciśnij przycisk (pozostało 9)
Poczekaj chwilę i ponownie naciśnij przycisk (pozostało 8)
Naciśnij guzik.
7. Otrzymujemy wiadomość:
Jest to pilot powtarzający sygnał, bez specjalnego kodu powtarzania.
Przytrzymanie przycisku może szybko spowodować utworzenie wielu kopii kodu tego przycisku.
Dlatego zostaną pobrane 64 próbki każdego przycisku.
Zostaniesz poproszony o podanie nazwy każdego przycisku po kolei.
Aby zakończyć nagrywanie przycisków, wprowadź pustą nazwę przycisku.
8. Teraz uczymy program WSZYSTKICH przycisków pilota. Kolejność jest następująca: Zostaniesz poproszony
Nazwa przycisku 1?
(nazwa pierwszego przycisku)? Piszemy imię. W przypadku liter lub cyfr łacińskich, bez spacji, lepiej jest pisać wielką literą słowo znajdujące się na przycisku na pilocie. Cóż, jak „1”, „2”, „PLAY”, „FFWD”, „STOP”, „VOL+”. Następnie naciśnij przycisk na kilka sekund. W oknie pojawią się liczby, mniej więcej takie:
Zainicjowano linię bazową.
mecze=64, błędy=19
Naciskamy, aż mecze osiągną 64. Im mniej błędów, tym lepiej.
9. Pojawia się słowo „Stop” i „Nazwa przycisku 2 (puste, aby zatrzymać)”. Piszemy nazwę drugiego przycisku. Powtarzaj krok 8, aż znikną wszystkie przyciski.
10. Po skompletowaniu wszystkich przycisków naciśnij „Enter” bez wpisywania nazwy. Wyświetla się komunikat „Konfiguracja napisana sukesfuli, nie zapomnij o analizie”. To co robimy.
11. Wciskamy myszkę w „Analizuj” i otrzymujemy odpowiedź „Analiza pomyślnie”
12. Cieszymy się.
13.„Wszystko gotowe” - kliknij OK, a następnie „Ukryj okno”.
Następnie możesz uruchomić swój ulubiony Light Alloy, przejść do ustawień, włączyć obsługę WinLIRC, skonfigurować przyciski i rzucić się na sofę z pilotem w dłoniach.
Serwer oryginalnego programu LIRC dla systemu Linux: http://www.lirc.org/.
Zawiera wiele plików konfiguracyjnych dla pilotów, opisów obwodów i innej dokumentacji.