Wie man einen Roboterarm für die Animatronik herstellt.
Um einen Roboterarm zu bauen, verwenden Sie ein Stück gewellten Kunststoffschlauch, eine CD-Hülle, Schnur, Kleber und Klebeband. Der Manipulator selbst ist stark genug, um beispielsweise eine Flasche oder ein Mobiltelefon zu halten.

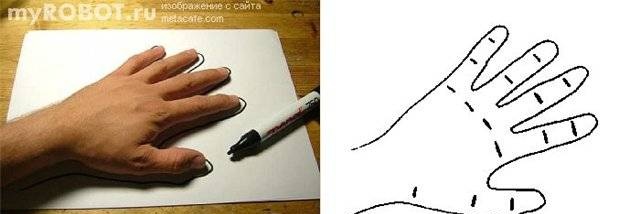
Erstellen Sie zunächst mit Ihrer eigenen Hand eine Roboterhandvorlage auf einem Blatt Papier. Markieren Sie die Scharniere für jeden „Finger“.
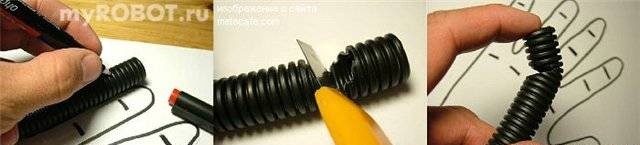
Machen Sie „Finger“ aus dem Plastikrohr, das Elektriker zum Verlegen von Drähten verwenden. Die Röhre lässt sich leicht mit einem normalen Büromesser schneiden. Schneiden Sie den Schlauch auf eine Länge ab, die dem Abstand von der Fingerspitze bis zum Handgelenk entspricht. Tun Sie dies für alle „Finger“ der Roboterhand. Markieren Sie an den resultierenden Rohren die Scharniere mit einem Marker und machen Sie dann für jede Biegung V-förmige Schnitte.
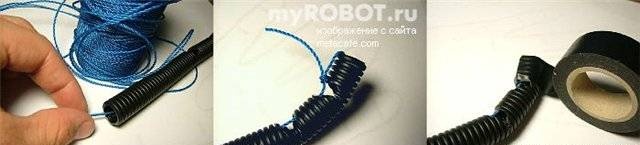
Führen Sie Nylonschnur in jeden Rohrfinger ein und befestigen Sie ihn. Lassen Sie die Enden lang genug (Sie können sie später jederzeit abschneiden).
Verwenden Sie eine alte CD-Hülle, um ein Stück Plastik zu erhalten. Verbinden Sie die „Finger“ mit einem ausgeschnittenen Stück Plastik: Kleben Sie die „Finger“ direkt unter die Gelenke.

Stellen Sie sicher, dass Sie die „Finger“ in der richtigen Reihenfolge platzieren.

Jetzt können Sie das Isolierband entfernen, mit dem die Schnur befestigt ist, und das Isolierband mehrmals umwickeln, um die „Finger“ fester zu verbinden.

Kleben Sie den Daumen wie auf dem Foto gezeigt und befestigen Sie ihn mit Isolierband, um ihn fester zu machen.

Machen Sie aus den Resten Ihrer CD-Hülle ein Handgelenk.

Es ist besser, die Hand des resultierenden Roboterarms zu stärken, indem man ihn in ein steiferes Rohr einführt.

Sie können Schaumgummi auf die „Handfläche“ und die Enden der „Finger“ kleben.

Der Roboterarm kann in einer Vielzahl von Animatronikprojekten eingesetzt werden. Um die Hand zu steuern, können Sie Servomotoren verwenden, indem Sie die Enden der Saite mit einem an ihrer Achse befestigten „Schaukelstuhl“ verbinden. Zwei Servos reichen aus, um die Hand des Roboters zum Leben zu erwecken. Ein Servomotor ist mit dem großen „Finger“ verbunden, der andere mit dem Rest. Um Ihre Hand bei Animatronikprojekten eindrucksvoller aussehen zu lassen, können Sie einen weichen, dünnen Handschuh darüber ziehen.
Ähnliche Meisterkurse






Besonders interessant






Kommentare (3)
